V1 Prototype Assembly
Written on February 8th, 2020 by John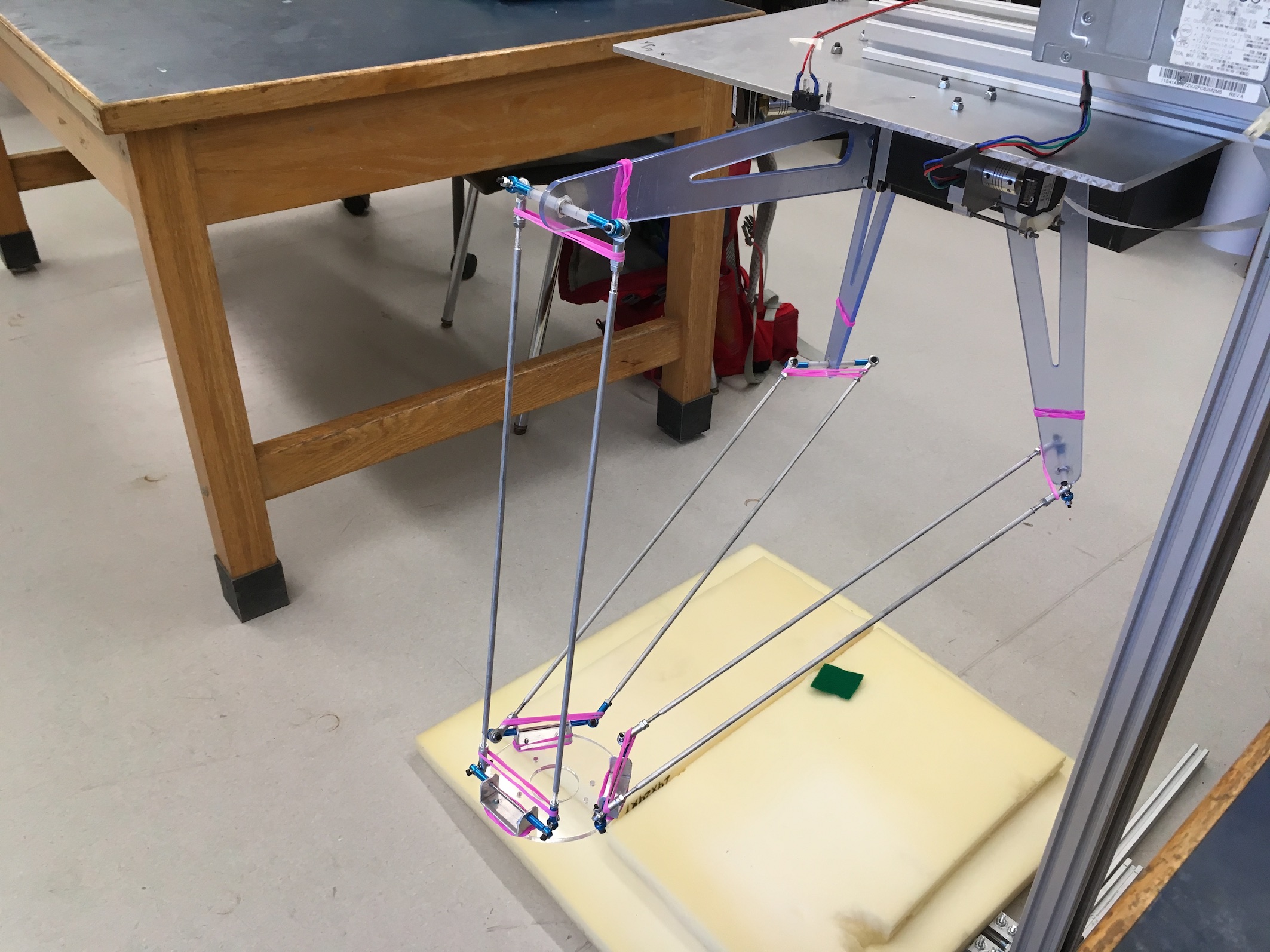
Upgraded Platform
After successful testing and limit switch integration on a laser-cut acrylic base plate for the delta robot, we have swapped to a machined aluminum baseplate for greater strength and reliability.
Tightened Tolerances
The ball joints that we originally ordered were very loosely toleranced, leading to an extremely shaky end effector. To mitigate this, we borrowed some better ball joints from UWaterloo MESS (Mechatronics Equipment Surplus System). I also investigated existing delta arm designs and realized that many had tensioned forearms (the aluminum rods in our case), and by putting elastics on ours, the positional accuracy was greatly increased. Plus, the hot pink adds some visibility to our moving end effector!
Prototype Electronics Platform
For our stationary test rack, I designed a laser-cut acrylic pattern to mount our power supply and PCBs on with mounting holes to attach to the test rack. It doesn’t look like a finished product yet, but it’s now a fully integrated system!
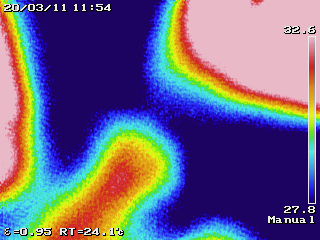
After a successful month of design and manufacturing, we’ve assembled our first prototype delta arm, and Aaron was able to validate the inverse kinematics! Some calibration work is needed, but we have successfully been able to identify a “weed” and position the delta arm end effector over top of it.