Testing, Testing, 1, 2, 3
Written on March 11th, 2020 by John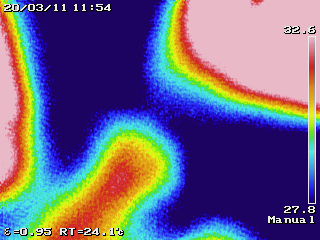
A robust machine is thoroughly tested.
Today we borrowed the Agilent U5855A Thermal Imager from the Keysight Kitchen on campus and analyzed the thermal performance of our robot.
Before running anything, we took a photo of the interior of the enclosure and on the underside of the robot, to later compare the temperatures of the motors and CPUs (which we predict will be the hottest components. Pay attention to the temperature scales when comparing the cool to warm images.
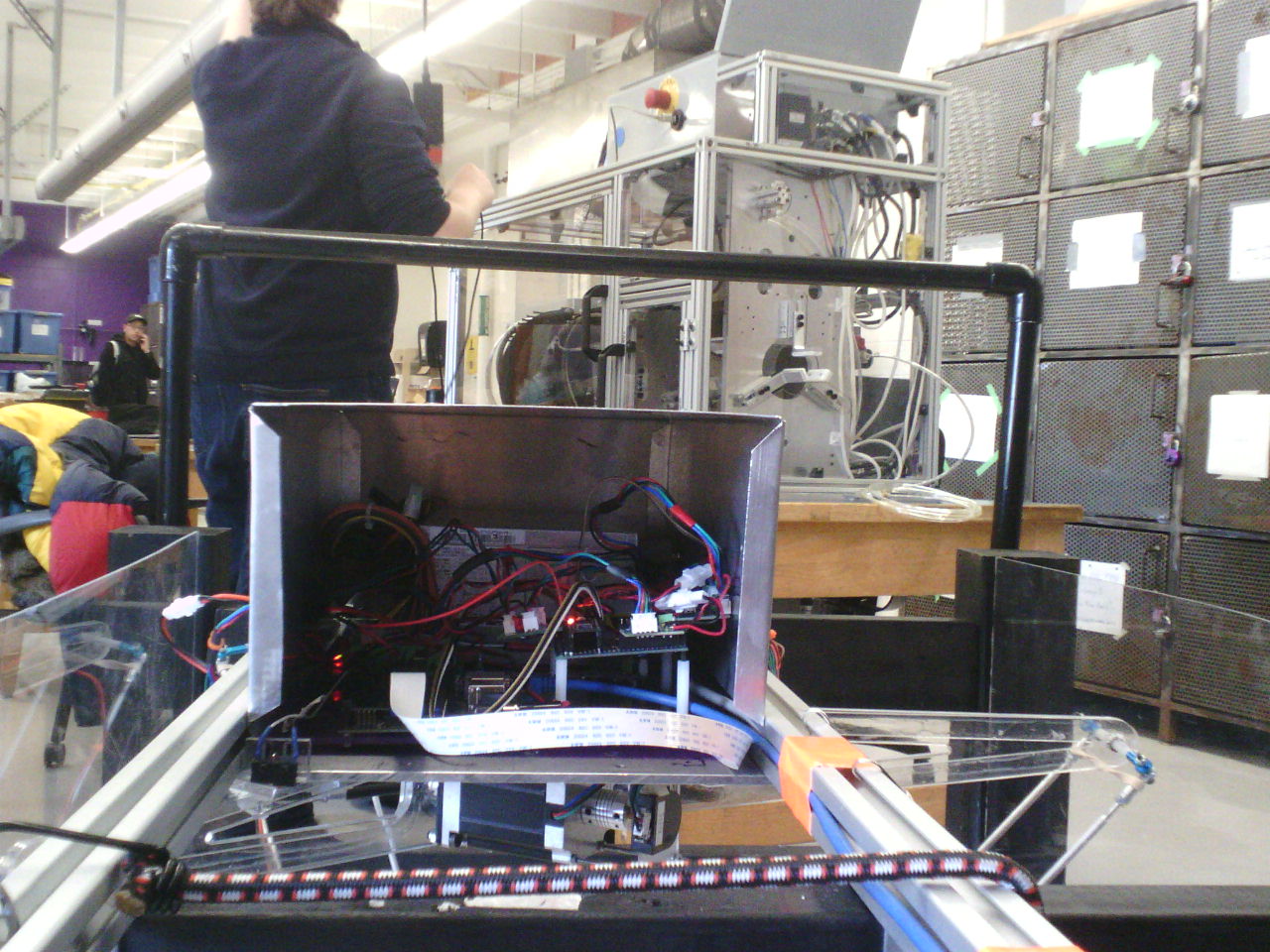
Interior, cool:

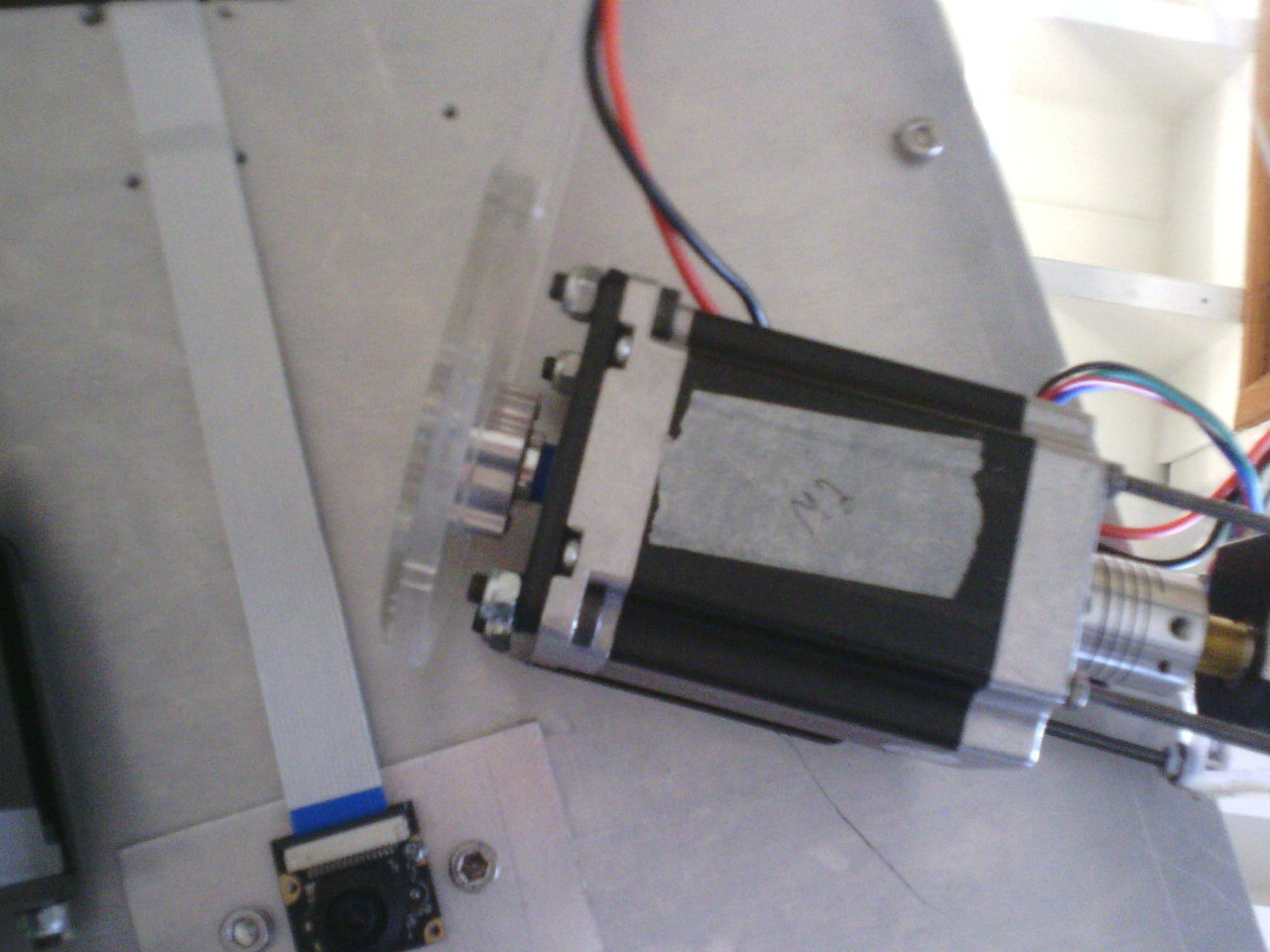
Motors, cool:
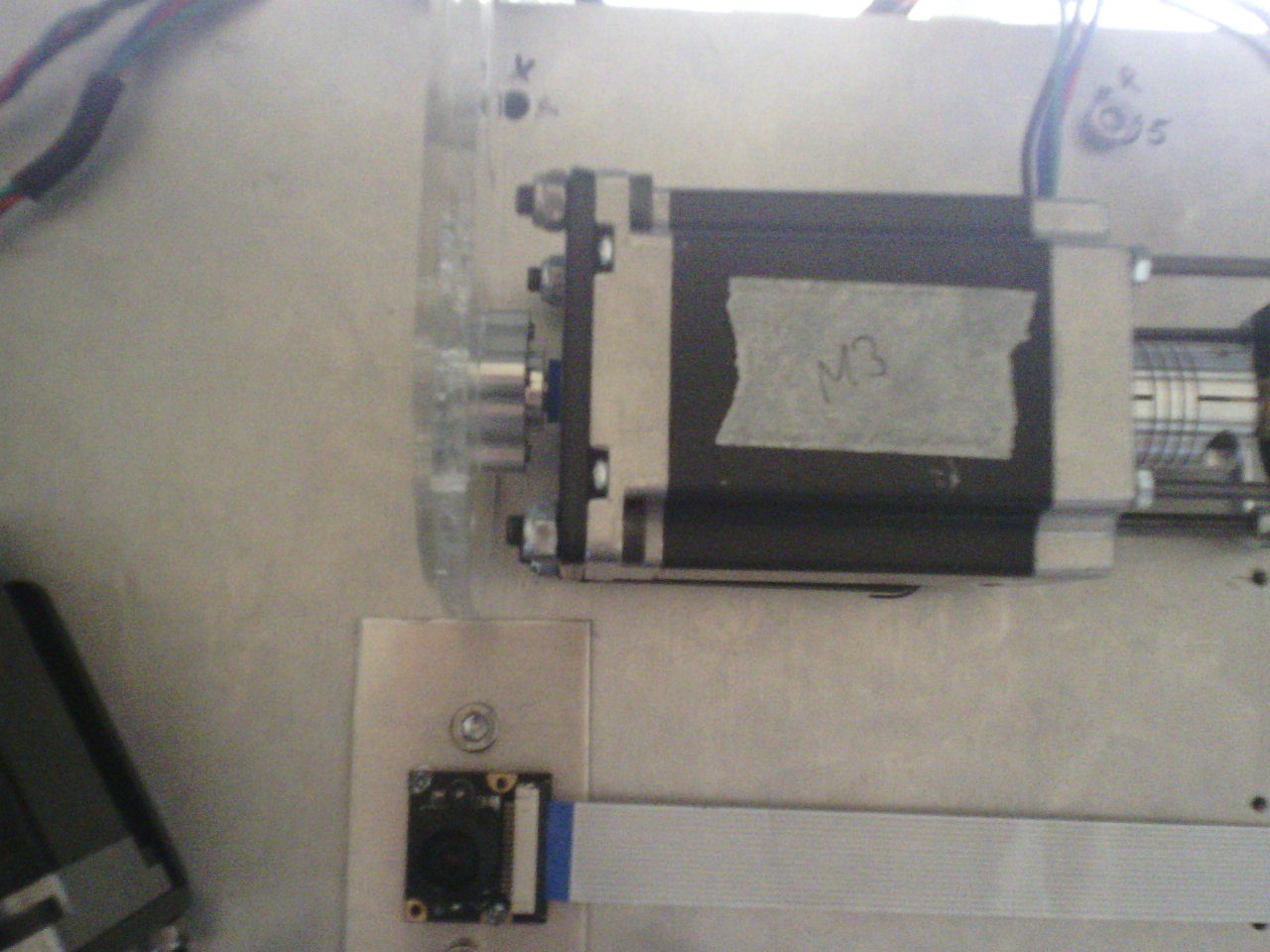
With a baseline temperature for comparison, we ran some tests and operated the robot for an hour, and took photos again.
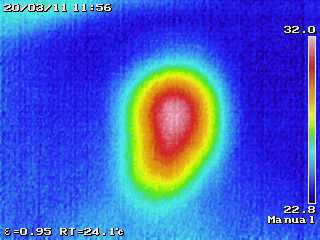
Interior, after 1 hr of operation:

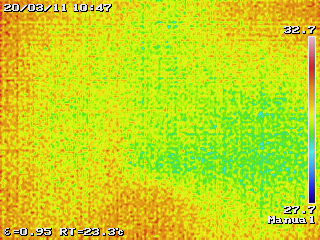
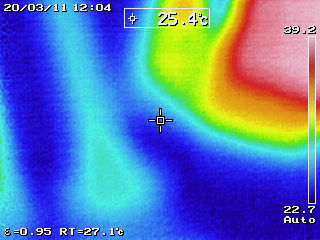
Motors, after 1 hr of operation:
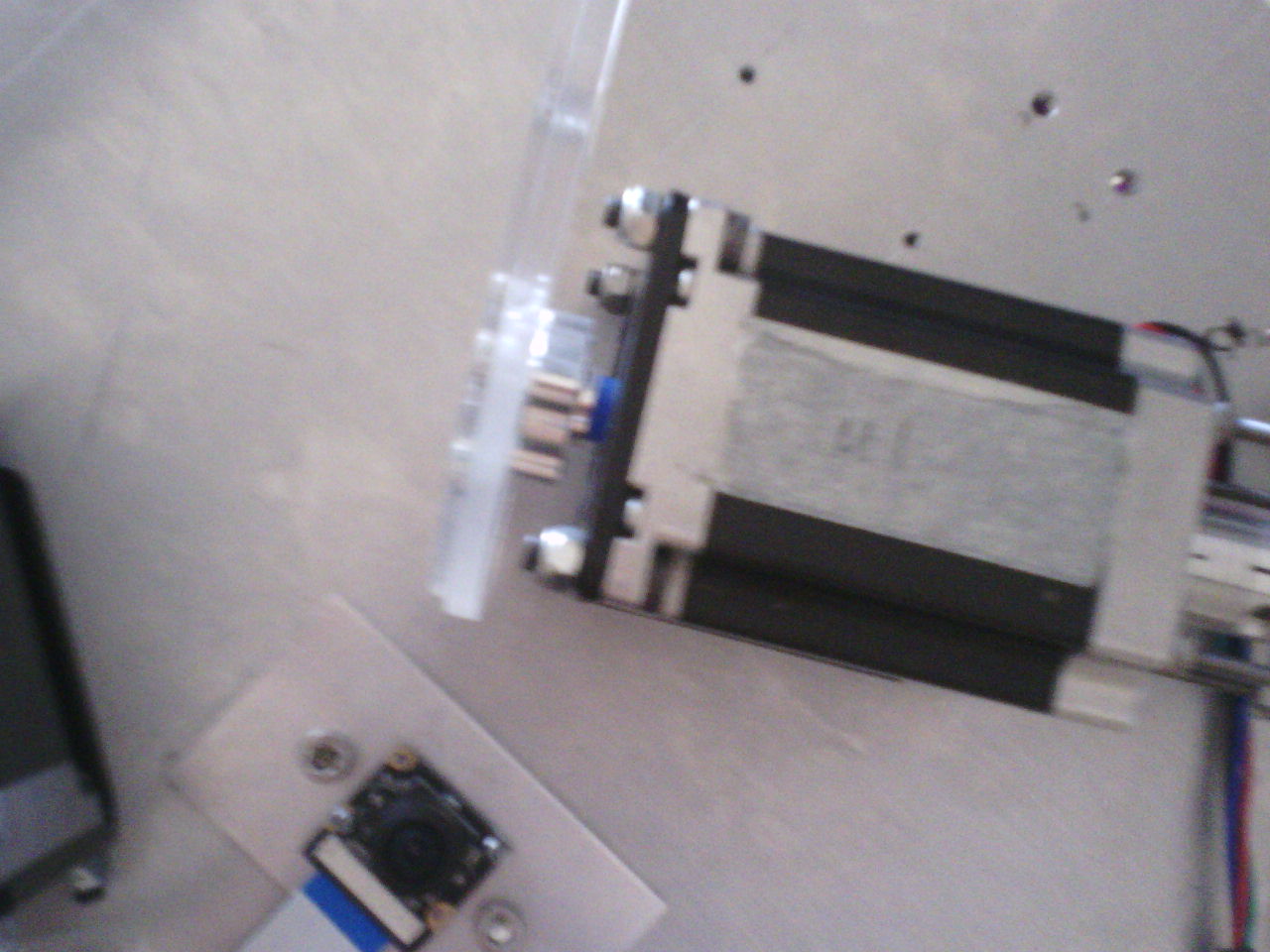

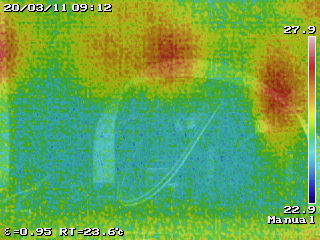
We observed the hottest points to be the Jetson, Teensy, and stepper motors, as expected. Nothing was dangerously warm or operating outside of their limits, with the maximum measured temperature of the interior being ~36.2 degrees Celsius, and the temperature of the motor staying at 32 degrees Celsius. We did notice that the camera looked particularly warm in this image, however after taking another image right after, we didn’t see a particularly warm temperature. After touching it, we concluded that this was not of any concern.
2nd image taken of motor and camera, showing cooler temperature:
We finished testing by confirming that we have a hot model to represent us for Friday’s symposium.